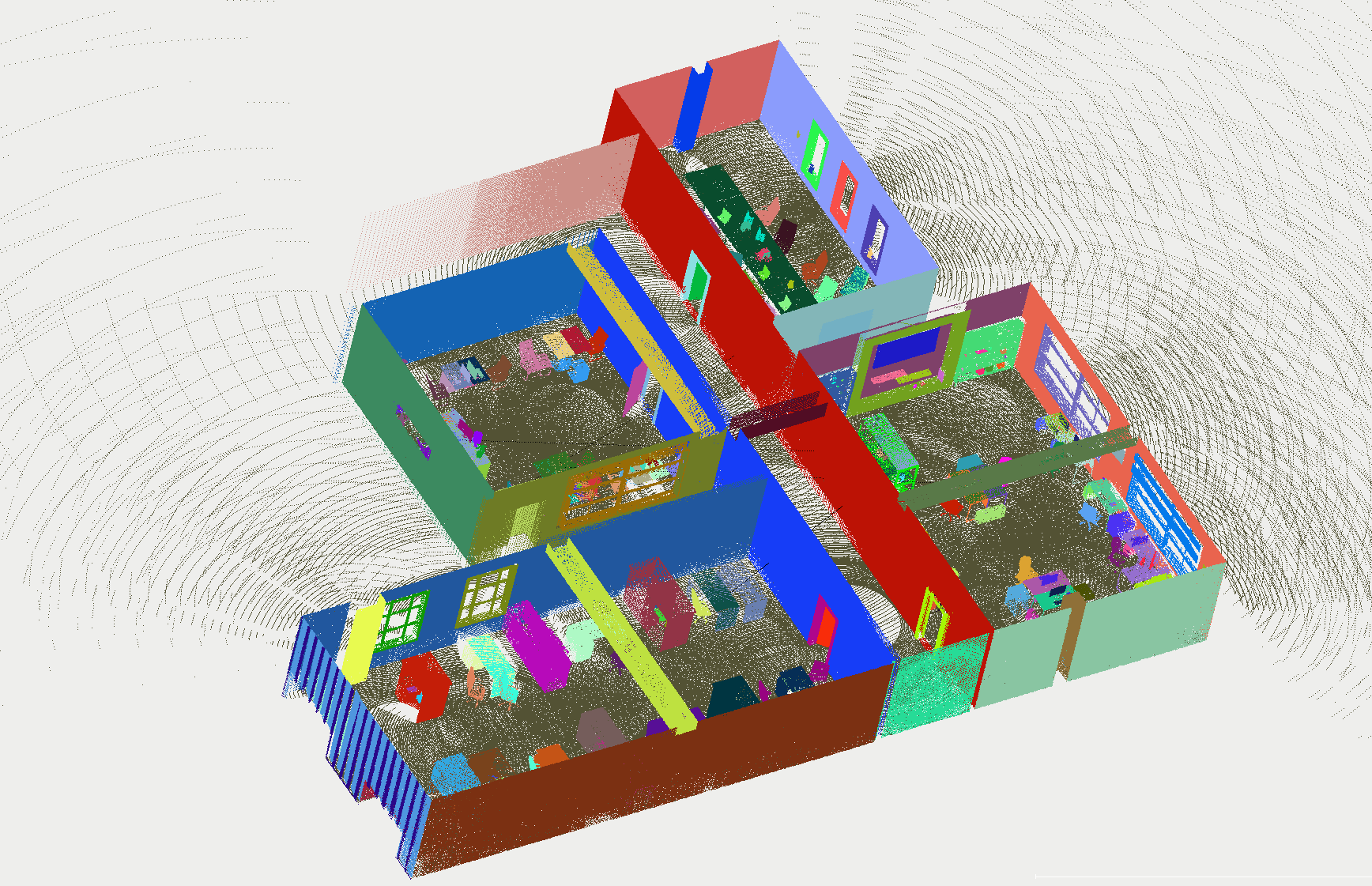
We present LiSTA (LiDAR Spatio-Temporal Analysis) Simulated LiDAR Dataset, a simulated LiDAR dataset designed to be analagous to the Ouster os0-128 LiDAR, with three office scenes, each with two missions. The dataset is designed for per-point evaluation of object level change detection algorithms.
Publication
This work has been accepted to the 2024 International Conference on Robotics and Automation (ICRA) and can be found here.
Video
Download
Get the dataset download link here.
Citation
@inproceedings{RowellLiSTAEnvironments,
author = {Rowell, Joseph and
Zhang, Lintong and
Fallon, Maurice},
title = {LiSTA: Geometric Object-Based Change Detection in Cluttered Environments},
booktitle = {IEEE Intl. Conf. on Robotics and Automation (ICRA)},
year = {2024},
doi = {placeholder},
}
Contact Us
If you have any feedback about the dataset please email us joseph@robots.ox.ac.uk
Authors
The following members of Dynamic Robot Systems Group at The Oxford Robotics Institute contributed to this dataset: Joseph Rowell, Lintong Zhang and Maurice Fallon.