Active Mapping
Active Mapping of Industrial Structures
In the context of robotics, active perceptual planning refers to exploration by a mobile robot equipped with sensors to conduct a survey of an object or environment of interest. It can be of assistance for the regular inspection and monitoring of remote or dangerous facilities such as offshore platforms.
Active mapping has been investigated for many applications, such as inspection and virtual modelling, and on many platforms, such as aerial, wheeled and underwater robots. However, the online deployment of such a system on a real robot still remains a challenge.
In recent years, there have been significant advances in quadruped mobility and hardware reliability, and the first industrial prototypes are being tested on live industrial facilities. Quadrupeds can cover the same terrain as wheeled or tracked robots but can also cross mobility hazards and climb stairs. While UAVs are being actively deployed for these kinds of missions, it is difficult to operate aerial platforms within confined spaces and their sensing payload is limited. Therefore we develop an online active mapping system on a quadruped robot to autonomously survey large physical objects without requiring a prior model.
Our approach
Our system builds and maintains a volumetric representation of the object of interest using OctoMap. It also takes on an iterative pipeline to determine the Next-Best-View (NBV) for further exploration, according to both the reconstruction itself and collision avoidance in the environment.
At the start of each iteration, the robot executes a scanning action that we designed to collect a sensor sweep. We accumulate LiDAR measurements during a scanning action into a larger point cloud and use it to update the occupancy probabilities of voxels in the OctoMap. We also use these LiDAR measurements to create an elevation map of the environment centred around the robot for local planning. Our system builds a Rapidly-exploring Random Tree (RRT) in the traversable area in the elevation map to generate a collection of candidate scan poses. For each candidate, our system computes its expected information gain based on the as-sensed terrain map as well as the cost of reaching it. These evaluations are used to find the best candidate pose as the NBV. Our system then optimises the path towards the NBV using RRT*, avoiding obstacles and un-traversable terrain.
The contributions of our research are as follows:
- Implementation of an active mapping system on a quadruped, enabling the robot to not only traverse an unstructured environment, but also to scan an object of interest in an optimal manner using LiDAR.
- Formulation of the approach as an NBV problem, which determines the best pose for the robot to conduct the next scan on the basis of metrics drawn from the partial reconstruction (information gain) and the environment map (cost of mobility).
- Evaluation of the system in simulated and real-world environments and the real-time deployment of our system on the ANYmal quadruped robot.
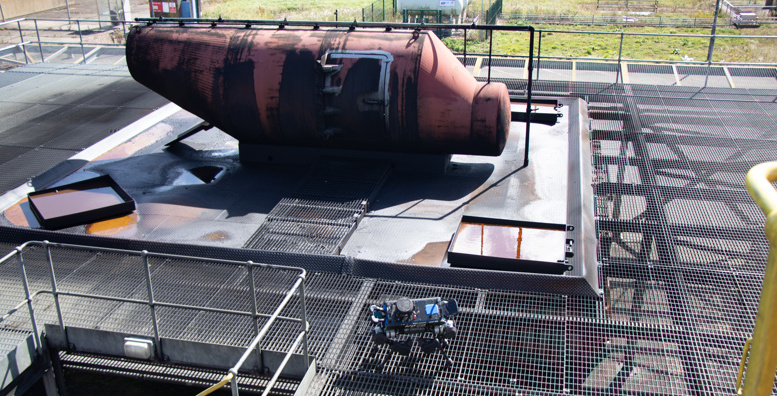
- We have conducted experiments in both simulated and real-world environments. The results show the capability and efficiency of our system. Here, we present a full system demonstration on the ANYbotics ANYmal reconstructing an industrial structure in one of our real-world experiments.
Publication

 “Actively Mapping Industrial Structures with Information Gain-Based Planning on a Quadruped Robot”, Yiduo Wang, Milad Ramezani, Maurice Fallon, IEEE Intl. Conf. on Robotics and Automation (ICRA), 2020.
“Actively Mapping Industrial Structures with Information Gain-Based Planning on a Quadruped Robot”, Yiduo Wang, Milad Ramezani, Maurice Fallon, IEEE Intl. Conf. on Robotics and Automation (ICRA), 2020.